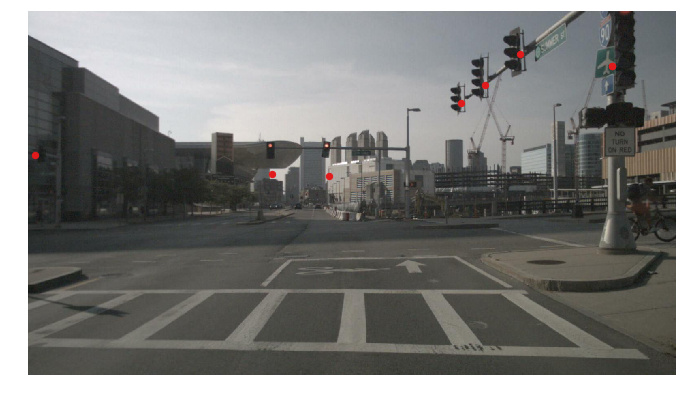
I want to convert coordinates of traffic lights into camera coordinates system but I was not able to do that. I used similar code to the function used to convert from point could to the camera but when I draw the points on the image, I found that they are not accurate. Could you please help me to figure out what is wrong with my code?
Here is my code:
import os
import json
import random
from typing import Dict, List, Tuple, Optional, Union
import descartes
from tqdm import tqdm
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.gridspec as gridspec
from matplotlib.patches import Rectangle, Arrow
from matplotlib.axes import Axes
from matplotlib.figure import Figure
from mpl_toolkits.axes_grid1.inset_locator import mark_inset
from PIL import Image
from shapely.geometry import Polygon, MultiPolygon, LineString, Point, box
from shapely import affinity
import cv2
from pyquaternion import Quaternion
from nuscenes.nuscenes import NuScenes
from nuscenes.utils.geometry_utils import view_points
from nuscenes.nuscenes import NuScenes
nusc = NuScenes(version=‘v1.0-mini’, verbose=False,dataroot=’/s/red/a/nobackup/vision/nuScenes/data/sets/nuscenes’)
camera_channel = ‘CAM_FRONT’
patch_radius=50
sample_record = nusc.get(‘sample’, sample_token)
scene_record = nusc.get(‘scene’, sample_record[‘scene_token’])
log_record = nusc.get(‘log’, scene_record[‘log_token’])
log_location = log_record[‘location’]
nusc_map = NuScenesMap(dataroot=’/s/red/a/nobackup/vision/nuScenes/data/sets/nuscenes’, map_name=log_location)
cam_token = sample_record[‘data’][camera_channel]
cam_record = nusc.get(‘sample_data’, cam_token)
cam_path = nusc.get_sample_data_path(cam_token)
im = Image.open(cam_path)
im_size = im.size
cs_record = nusc.get(‘calibrated_sensor’, cam_record[‘calibrated_sensor_token’])
cam_intrinsic = np.array(cs_record[‘camera_intrinsic’])
layer_names = [‘traffic_light’]
cam_token = sample_record[‘data’][camera_channel]
cam_record = nusc.get(‘sample_data’, cam_token)
cam_path = nusc.get_sample_data_path(cam_token)
im = Image.open(cam_path)
im_size = im.size
cs_record = nusc.get(‘calibrated_sensor’, cam_record[‘calibrated_sensor_token’])
cam_intrinsic = np.array(cs_record[‘camera_intrinsic’])
Retrieve the current map.
poserecord = nusc.get(‘ego_pose’, cam_record[‘ego_pose_token’])
ego_pose = poserecord[‘translation’]
box_coords = (
ego_pose[0] - patch_radius,
ego_pose[1] - patch_radius,
ego_pose[0] + patch_radius,
ego_pose[1] + patch_radius,
)
records_in_patch = nusc_map.get_records_in_patch(box_coords, layer_names, ‘intersect’)
Init axes.
fig = plt.figure(figsize=(9, 16))
ax = fig.add_axes([0, 0, 1, 1])
ax.set_xlim(0, im_size[0])
ax.set_ylim(0, im_size[1])
ax.imshow(im)
near_plane = 1e-8
Retrieve and render each record.
for layer_name in layer_names:
for token in records_in_patch[layer_name]:
record = nusc_map.get(layer_name, token)
line = nusc_map.extract_line(record['line_token'])
if line.is_empty: # Skip lines without nodes
continue
xs, ys = line.xy
points=np.array([[record['pose']['tx']],[record['pose']['ty']],[record['pose']['tz']]])
# Transform into the ego vehicle frame for the timestamp of the image.
points = points - np.array(poserecord['translation']).reshape((-1, 1))
points = np.dot(Quaternion(poserecord['rotation']).rotation_matrix.T, points)
# Transform into the camera.
points = points - np.array(cs_record['translation']).reshape((-1, 1))
points = np.dot(Quaternion(cs_record['rotation']).rotation_matrix.T, points)
# Remove points that are partially behind the camera.
depths = points[2, :]
behind = depths < near_plane
if np.all(behind):
continue
# Grab the depths before performing the projection (z axis points away from the camera).
depths1 = points[2, :]
# Take the actual picture (matrix multiplication with camera-matrix + renormalization).
points = view_points(points[:3,:], cam_intrinsic, normalize=True)
depths = points[2, :]
print(points)
# Skip polygons where all points are outside the image.
# Leave a margin of 1 pixel for aesthetic reasons.
inside = np.ones(depths.shape[0], dtype=bool)
inside = np.logical_and(inside, points[0, :] > 1)
inside = np.logical_and(inside, points[0, :] < im.size[0] - 1)
inside = np.logical_and(inside, points[1, :] > 1)
inside = np.logical_and(inside, points[1, :] < im.size[1] - 1)
if np.any(np.logical_not(inside)):
continue
points = points[:2, :]
plt.scatter(points[0], points[1], c=nusc_map.explorer.color_map['walkway'], s=70)
Display the image.
plt.axis(‘off’)
ax.invert_yaxis()
Here are some example of the plots: