
Hello,
I have 4 corner radars that I am trying to give speed and yaw to compensate for the ego-motion. However, it is only working for the front-facing radar because the velocity of the vehicle is in the same direction as the radar.
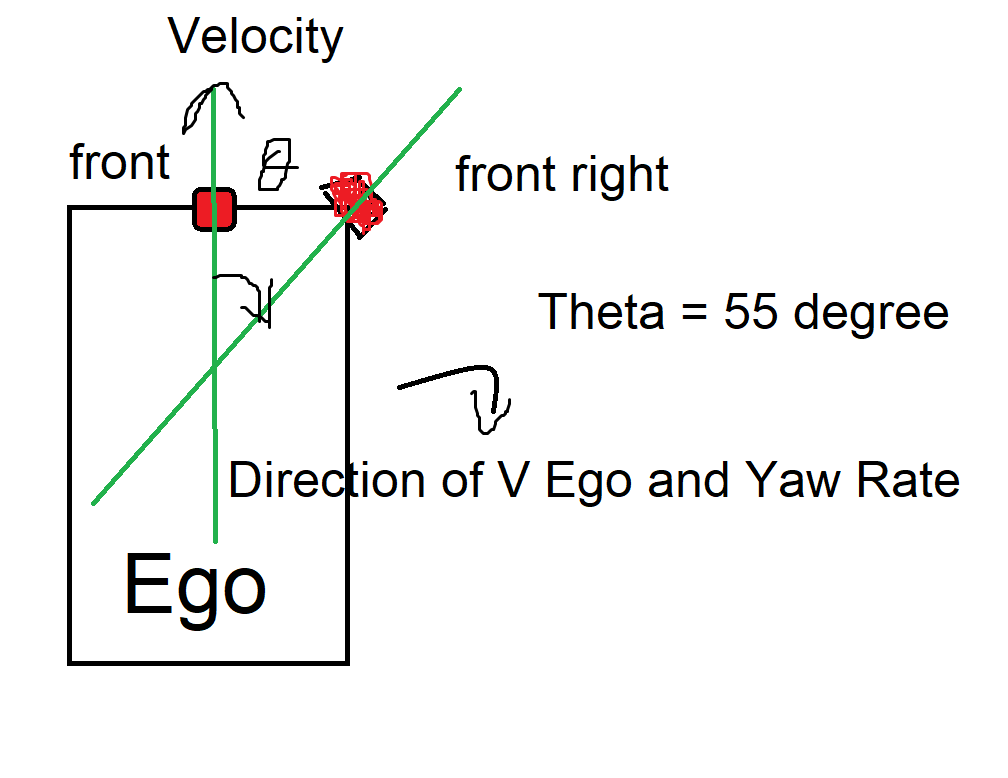
So based on this picture, I am forwarding the velocity and yaw rate as it is to the front radar, and it compensates for the motion correctly.
For the corner radar, I am giving Vcostheta and yaw rate but it isn’t compensating correctly.
Any insights into what I might be doing wrong?
Thanks in advance.