HI,
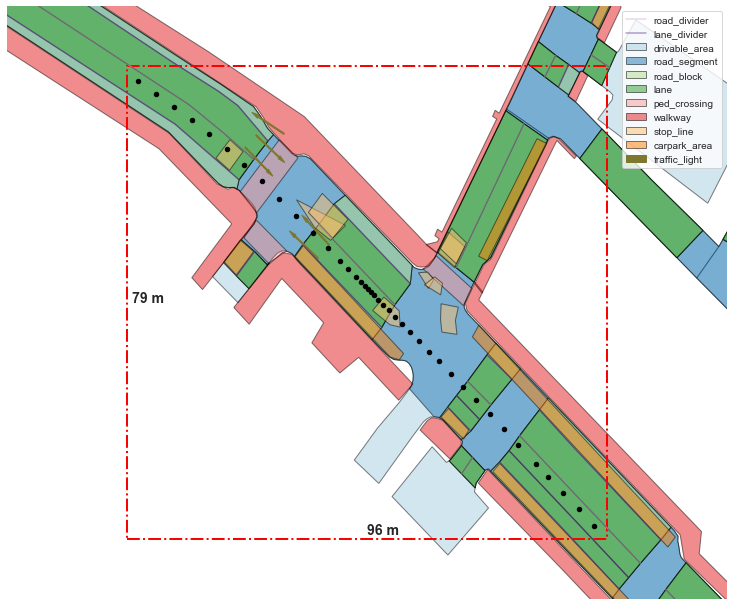
Is it possible to get a continuous static map for an entire scene (in the form of an image ). I can take the map of each sample in a scene and join them with the difference in distance moved by the ego vehicle between frames, but i wanted to know if there was an easier way to do this