Thank you for the quick answer.
You said it won’t make a significant difference, but there are many objects with a lot of LiDAR points but without any radar point if you plot radar and LiDAR points.
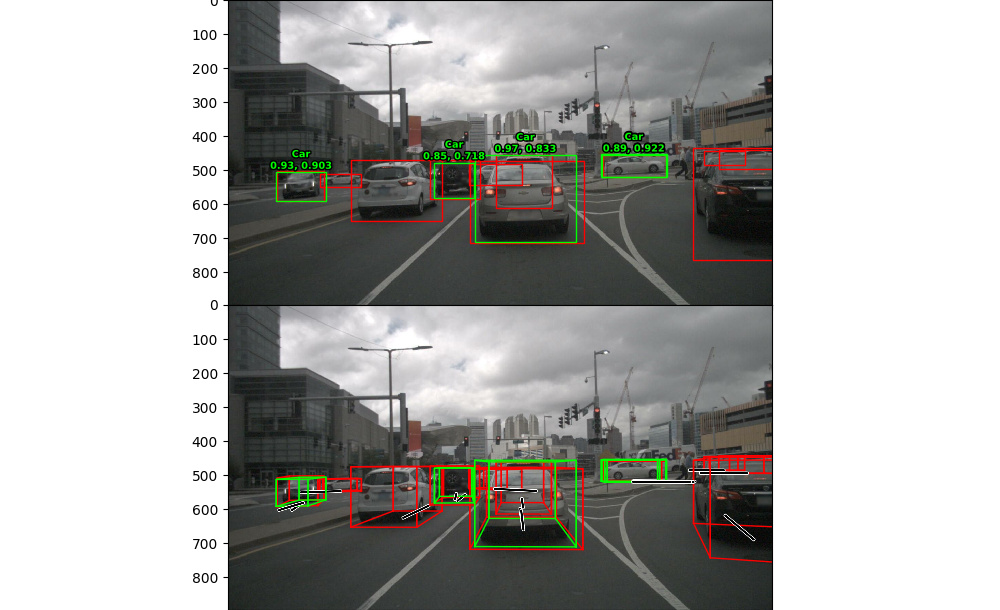
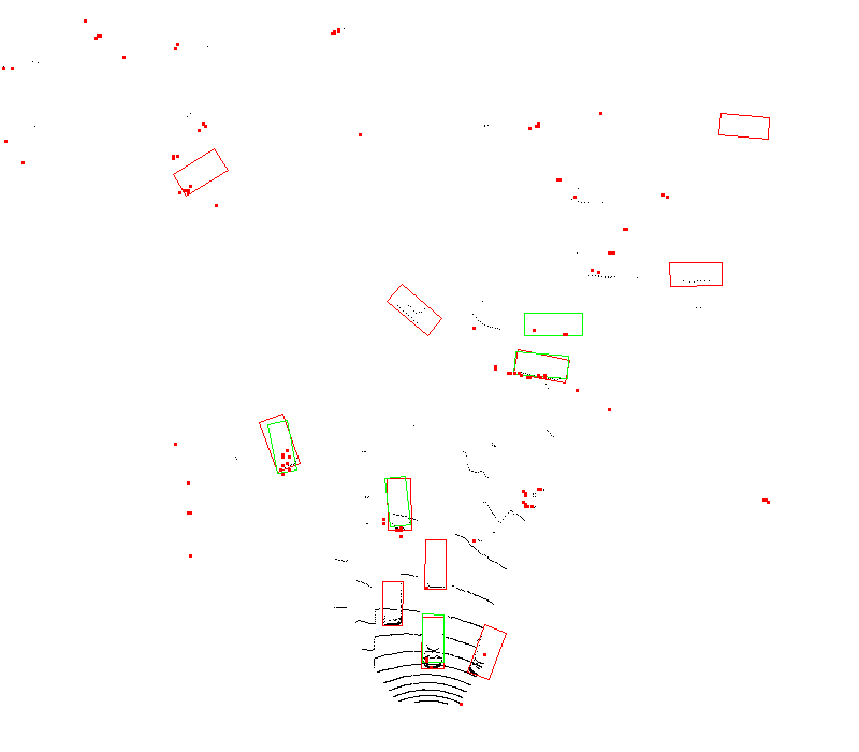
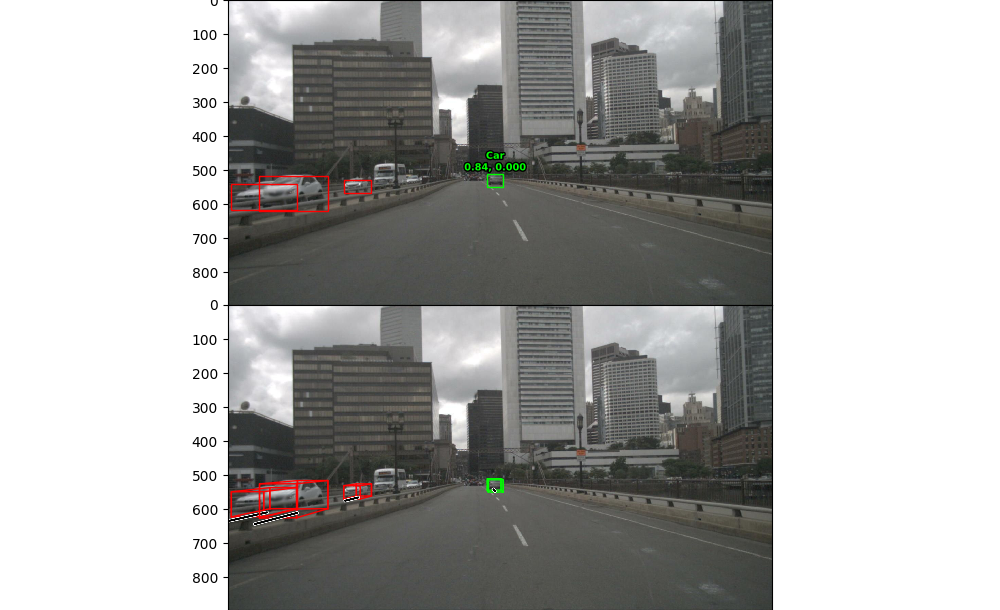
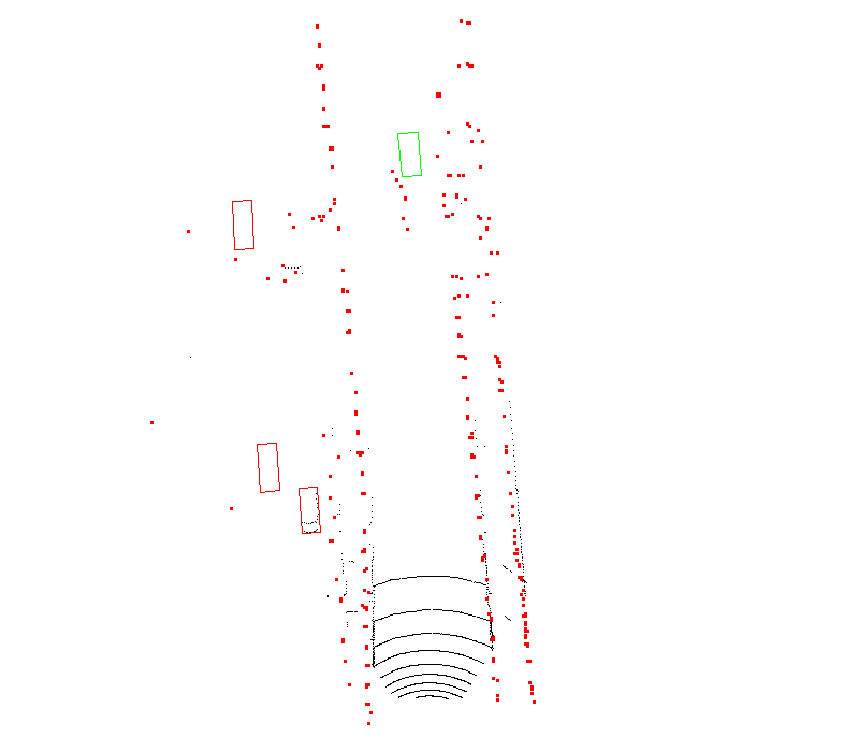
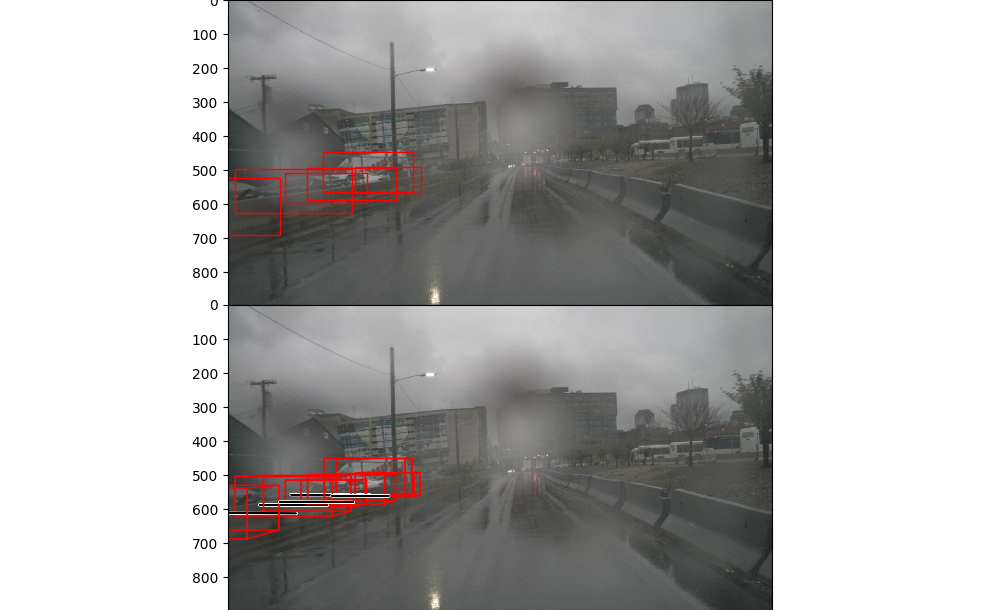
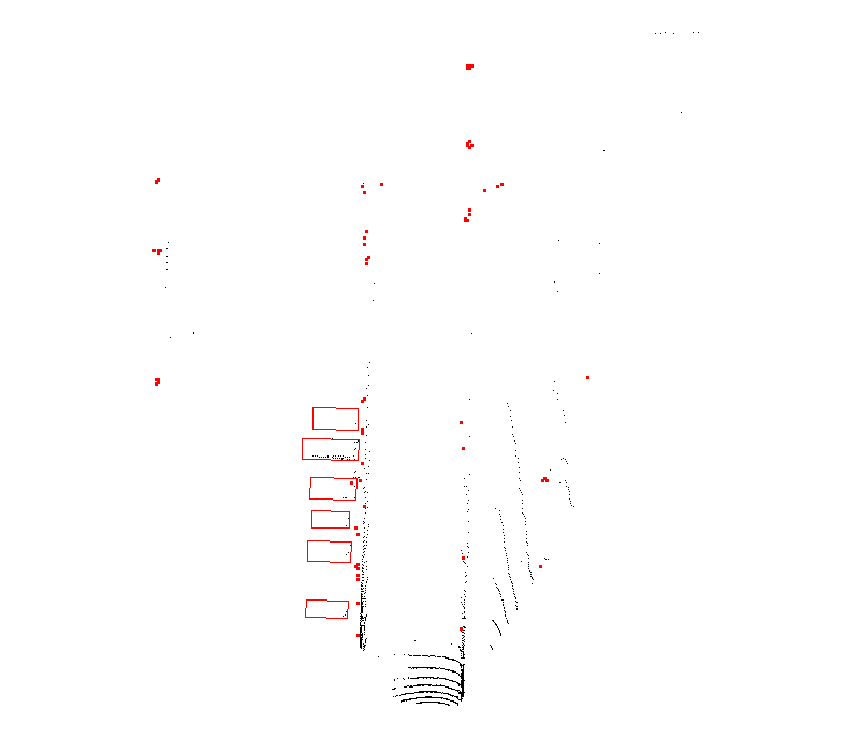
I attach some examples, red point: radar (5 sweeps), black point: lidar (1 sweep), red box: ground truth
I guess one of the major reason can be the poor azimuth resolution and occlusion.
Also, radar is mounted on the bumper, not the top as LiDAR, so the FoV can be easily blocked by obstacles as guardrails.
And another reason can be the nature of the wavelength of the radar, because it cannot detect through the wired fence.
I didn’t count the number of vehicle with LiDAR and without radar point yet, but I guess there will be the number of vehicles do not contain radar point.
Moreover, this is even worse with side cameras.
So I wonder if it will be fair to use the same preprocessing method as LiDAR.