
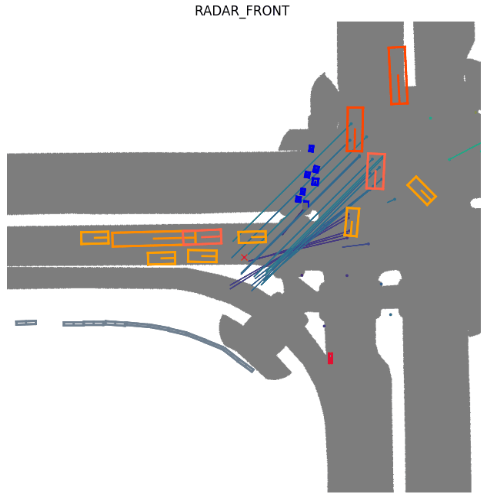
I’m using the official visualization function ‘nusc.render_sample_data’ to visualize the RADAR points velocity vectors. (The ‘v1.0-mini’ nusc.sample[80:120] frames, and the ego vehicle is not moving).
Based on my understanding, because I’m visualizing the points from ‘RADAR_FRONT’, all the velocity vectors should perfectly converge to one point in BEV due to the RADAR radial velocity measurement. However, the vectors only approximately point to the position of radar sensor, but they do not converge to one exact point in the BEV, as shown in the Figure above.
I wonder what is the reason behind this. Is there any bugs in the visualization function, or is this due to the internal radar measurement noises / errors which is out of our control?
