hi,
Is there a way to only render specific bouning box categories with “with_anns” in render_sample_data ?
With_anns for rendering
@Naveed here’s how I would approach it:
import matplotlib.pyplot as plt
import numpy as np
from PIL import Image
from nuscenes.nuscenes import NuScenes
categories_to_render = [
'movable_object.barrier',
'vehicle.car'
]
sample_data_token = 'e3d495d4ac534d54b321f50006683844'
# Load nuScenes.
nusc = NuScenes(version='v1.0-mini', dataroot='/data/sets/nuscenes', verbose=False)
# Load boxes and image.
data_path, boxes, camera_intrinsic = nusc.get_sample_data(sample_data_token) # , selected_anntokens=[])
data = Image.open(data_path)
# Init axes.
_, ax = plt.subplots(1, 1, figsize=(9, 16))
# Show image.
ax.imshow(data)
# Show boxes.
for box in boxes:
if box.name in categories_to_render:
c = np.array(nusc.explorer.get_color(box.name)) / 255.0
box.render(ax, view=camera_intrinsic, normalize=True, colors=(c, c, c))
# Limit visible range.
ax.set_xlim(0, data.size[0])
ax.set_ylim(data.size[1], 0)
ax.axis('off')
ax.set_aspect('equal')
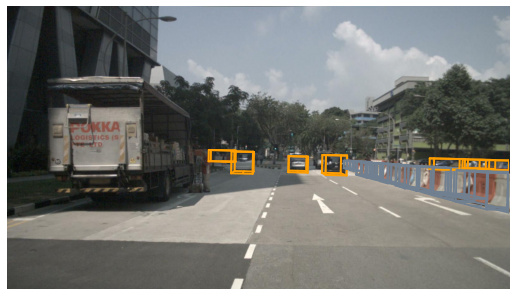
The above would render the following:
Thank you so much for this. In order to get the top lidar view I would have to change the view=camera_intrinsic to a lidar_top view matrix ?
Rendering the top lidar view is slightly more involved, but here’s one way to do it:
import os
import matplotlib.pyplot as plt
import numpy as np
from PIL import Image
from pyquaternion import Quaternion
from nuscenes.nuscenes import NuScenes
from nuscenes.utils.data_classes import LidarPointCloud
from nuscenes.utils.geometry_utils import view_points, transform_matrix
categories_to_render = [
'movable_object.barrier',
'vehicle.car'
]
sample_data_token = '9d9bf11fb0e144c8b446d54a8a00184f'
# Load nuScenes.
nusc = NuScenes(version='v1.0-mini', dataroot='/data/sets/nuscenes', verbose=False)
sample_data_record = nusc.get('sample_data', sample_data_token)
# Load boxes.
_, boxes, _ = nusc.get_sample_data(sample_data_token, use_flat_vehicle_coordinates=True)
# Load a single lidar point cloud.
pcl_path = os.path.join(nusc.dataroot, sample_data_record['filename'])
pc = LidarPointCloud.from_file(pcl_path)
# Init axes.
_, ax = plt.subplots(1, 1, figsize=(9, 16))
# Retrieve transformation matrices for reference point cloud.
cs_record = nusc.get('calibrated_sensor', sample_data_record['calibrated_sensor_token'])
pose_record = nusc.get('ego_pose', sample_data_record['ego_pose_token'])
ref_to_ego = transform_matrix(translation=cs_record['translation'],
rotation=Quaternion(cs_record["rotation"]))
# Compute rotation between 3D vehicle pose and "flat" vehicle pose (parallel to global z plane).
ego_yaw = Quaternion(pose_record['rotation']).yaw_pitch_roll[0]
rotation_vehicle_flat_from_vehicle = np.dot(
Quaternion(scalar=np.cos(ego_yaw / 2), vector=[0, 0, np.sin(ego_yaw / 2)]).rotation_matrix,
Quaternion(pose_record['rotation']).inverse.rotation_matrix
)
vehicle_flat_from_vehicle = np.eye(4)
vehicle_flat_from_vehicle[:3, :3] = rotation_vehicle_flat_from_vehicle
viewpoint = np.dot(vehicle_flat_from_vehicle, ref_to_ego)
# Show point cloud.
axes_limit = 40
points = view_points(pc.points[:3, :], viewpoint, normalize=False)
dists = np.sqrt(np.sum(pc.points[:2, :] ** 2, axis=0))
colors = np.minimum(1, dists / axes_limit / np.sqrt(2))
point_scale = 0.2
scatter = ax.scatter(points[0, :], points[1, :], c=colors, s=point_scale)
# Show boxes.
for box in boxes:
if box.name in categories_to_render:
c = np.array(nusc.explorer.get_color(box.name)) / 255.0
box.render(ax, view=np.eye(4), colors=(c, c, c))
# Limit visible range.
ax.set_xlim(-axes_limit, axes_limit)
ax.set_ylim(-axes_limit, axes_limit)
ax.axis('off')
ax.set_aspect('equal')
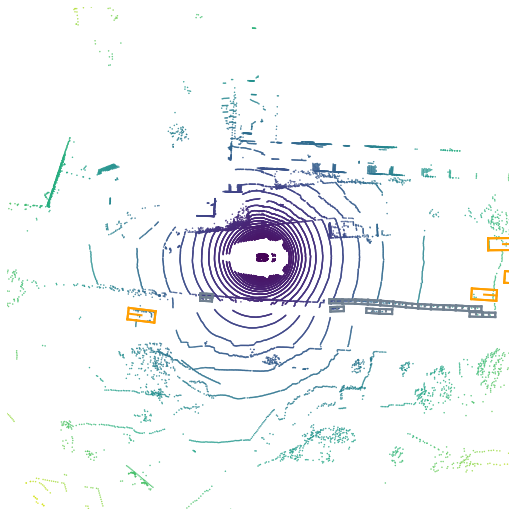
The above would render the following: