
Good morning,
I am working on a radar object detection pipeline and would like to retrieve a dataset of instances which uses all 5 radar sensors pointclouds combined (basically what the car can see from radar perspectivee), along with all the annotations for each instance. However, I am struggling to convert the pointclouds for each sensor to ego coordinates, as they are initially available in the sensor format
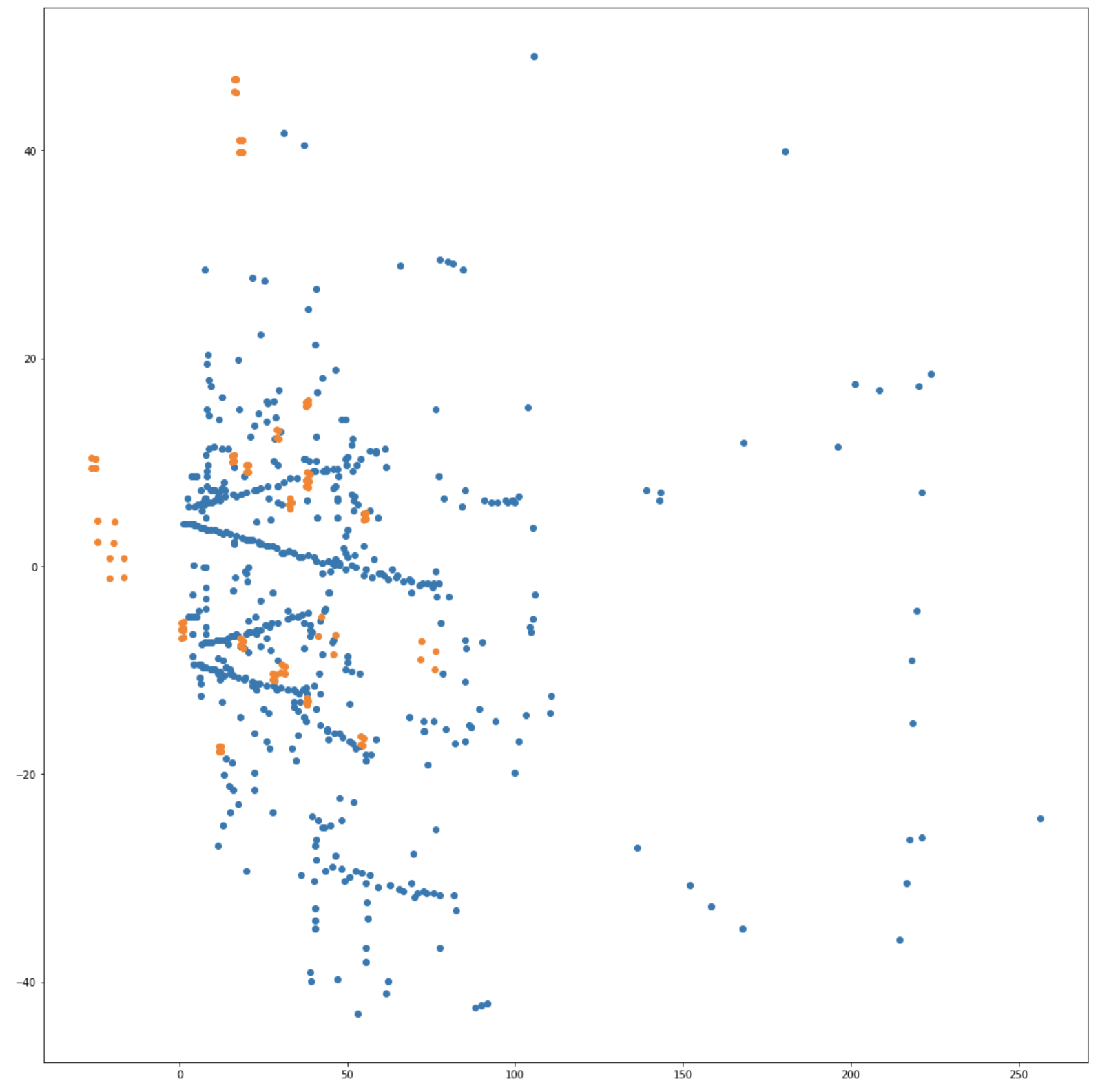
As can be seen the pic above aggreates all 5 pointclouds but it is wrong, because since they are in sensor coordinates, all get displayed in the positive X, so they just overlap, whereas the correct one should have the car in the centre and 5 pointclouds covering the 360 degrees around it. The boxes (orange) seem to be fine.
Any ideas are really welcome. Thanks in advance.