Hi,
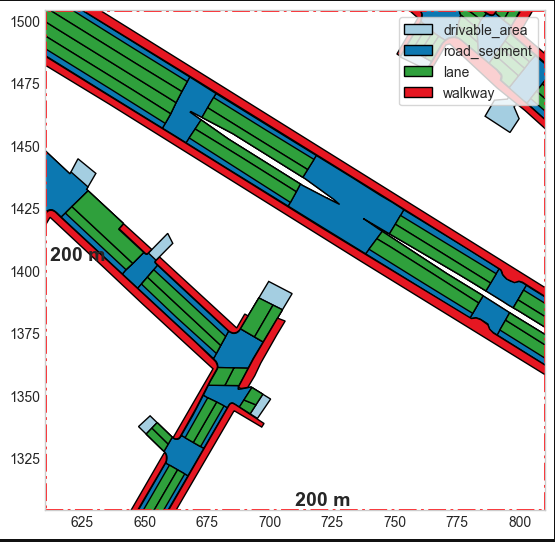
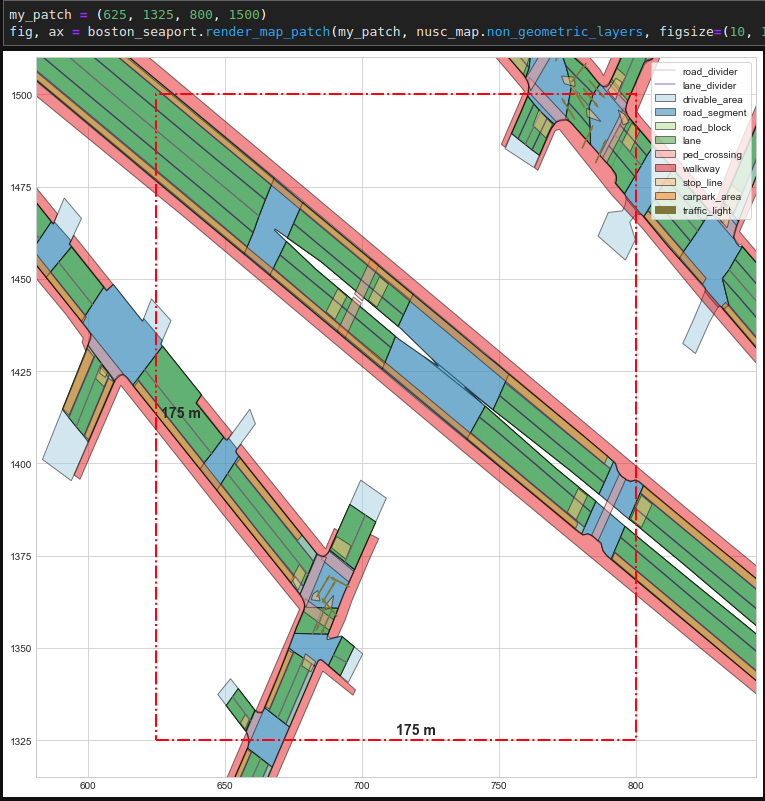
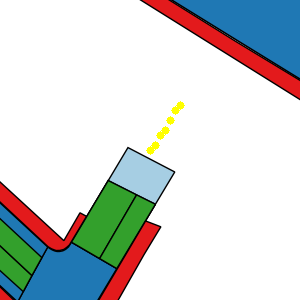
I’m having an issue when it comes to rendering position of an annotated agent on the top of the map (see image below). It seems that various agents are rendered outside of the actual map, positions extracted from annotations are correct as I checked it multiple times with respect to map coordinates. I was wondering if that is a common issue and if it can be solved?
Scene: 397
First Annotation Token: 90299aba33814fa38b0dd7828059cad0
Cheers,