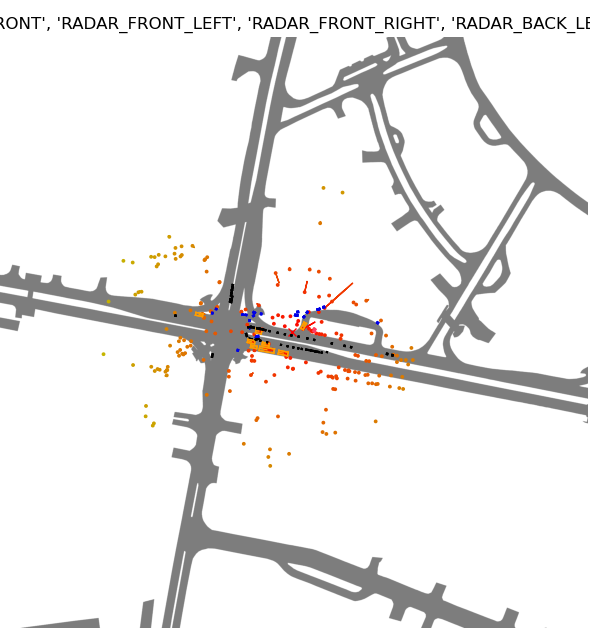
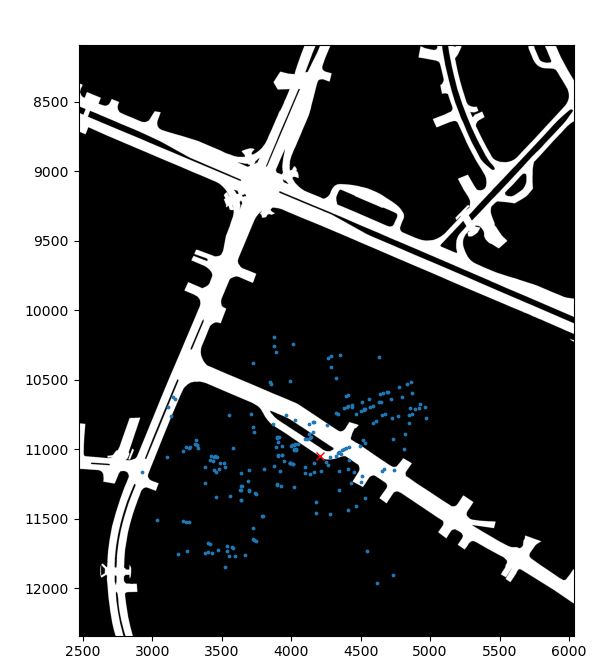
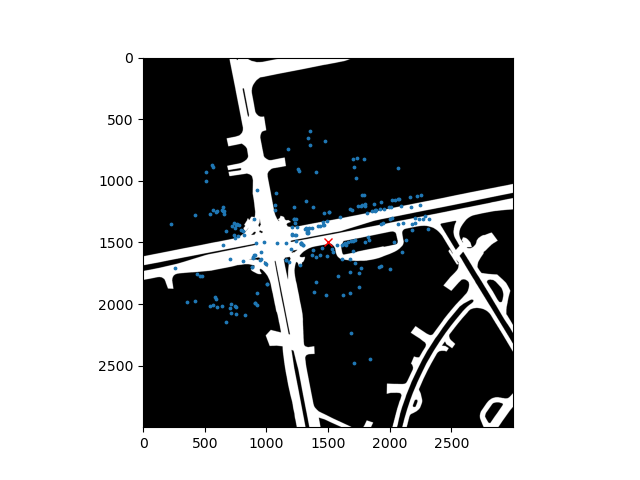
I sort of fixed it by making a function that does all the transformations on point clouds and the map that normally get done in render_sample_data, RadarPointCloud.from_file_multisweep and render_egocentric_map. It returns a correct plot (shown below), but it’s far from an elegant solution.
def transform_pc_and_map(self, sample_token: str, axes_limit: int = 150, base_directory: str = '',
use_contour: bool = True, do_plot: bool = False) -> tuple:
def crop_image(image: np.array,
x_px: int,
y_px: int,
axes_limit_px: int) -> np.array:
x_min = int(x_px - axes_limit_px)
x_max = int(x_px + axes_limit_px)
y_min = int(y_px - axes_limit_px)
y_max = int(y_px + axes_limit_px)
cropped_image = image[y_min:y_max, x_min:x_max]
return cropped_image
# nuscenes stuff
scene_token, log_token = self.__tokens_from_sample(sample_token)
current_sample_record = self.nusc.get('sample', sample_token)
ref_channel = 'LIDAR_TOP'
ref_sd_token = current_sample_record['data'][ref_channel]
ref_sd_record = self.nusc.get('sample_data', ref_sd_token)
ref_pose_record = self.nusc.get('ego_pose', ref_sd_record['ego_pose_token'])
ref_cs_record = self.nusc.get('calibrated_sensor', ref_sd_record['calibrated_sensor_token'])
radar_modalities = ('RADAR_FRONT', 'RADAR_FRONT_LEFT', 'RADAR_FRONT_RIGHT', 'RADAR_BACK_LEFT',
'RADAR_BACK_RIGHT')
# get map information
basic_mask: MapMask = self.nusc.get('map', self.nusc.get('log', log_token)['map_token'])['mask']
if use_contour:
mask_raster = self.__contour_mask_from_sample(sample_token, base_directory=base_directory)
else:
mask_raster = basic_mask.mask()
# get radar point cloud
points_total = np.zeros((4, 0))
for mod in radar_modalities:
# get data
current_sd_token = current_sample_record['data'][mod]
current_sd_record = self.nusc.get('sample_data', current_sd_token)
current_pose_record = self.nusc.get('ego_pose', current_sd_record['ego_pose_token'])
current_cs_record = self.nusc.get('calibrated_sensor', current_sd_record['calibrated_sensor_token'])
pc = RadarPointCloud.from_file(osp.join(self.nusc.dataroot, current_sd_record['filename']))
points = np.vstack((pc.points[:3, :], np.ones(pc.points.shape[1])))
# Transformations done in from_file_multisweep
# Homogeneous transform from ego car frame to reference frame.
ref_from_car = transform_matrix(ref_cs_record['translation'], Quaternion(ref_cs_record['rotation']),
inverse=True)
# Homogeneous transformation matrix from global to _current_ ego car frame.
car_from_global = transform_matrix(ref_pose_record['translation'], Quaternion(ref_pose_record['rotation']),
inverse=True)
global_from_car = transform_matrix(current_pose_record['translation'],
Quaternion(current_pose_record['rotation']), inverse=False)
# Homogeneous transformation matrix from sensor coordinate frame to ego car frame.
car_from_current = transform_matrix(current_cs_record['translation'], Quaternion(current_cs_record['rotation']),
inverse=False)
# Fuse four transformation matrices into one and perform transform.
trans_matrix = reduce(np.dot, [ref_from_car, car_from_global, global_from_car, car_from_current])
points = trans_matrix.dot(points)
points_total = np.hstack((points_total, points))
# Transformations done in render_sample_data
# Compute rotation between 3D vehicle pose and "flat" vehicle pose (parallel to global z plane).
ref_to_ego = transform_matrix(translation=ref_cs_record['translation'],
rotation=Quaternion(ref_cs_record["rotation"]))
ego_yaw = Quaternion(ref_pose_record['rotation']).yaw_pitch_roll[0]
rotation_vehicle_flat_from_vehicle = np.dot(
Quaternion(scalar=np.cos(ego_yaw / 2), vector=[0, 0, np.sin(ego_yaw / 2)]).rotation_matrix,
Quaternion(ref_pose_record['rotation']).inverse.rotation_matrix)
vehicle_flat_from_vehicle = np.eye(4)
vehicle_flat_from_vehicle[:3, :3] = rotation_vehicle_flat_from_vehicle
viewpoint = np.dot(vehicle_flat_from_vehicle, ref_to_ego)
points_total = viewpoint.dot(points_total)
# Transformations done in render_egocentric_map
# Retrieve and crop mask.
pixel_coords = basic_mask.to_pixel_coords(ref_pose_record['translation'][0],
ref_pose_record['translation'][1])
scaled_limit_px = int(axes_limit * (1.0 / basic_mask.resolution))
# noinspection PyTypeChecker
cropped = crop_image(mask_raster, pixel_coords[0], pixel_coords[1], int(scaled_limit_px * np.sqrt(2)))
# Rotate image.
ypr_rad = Quaternion(ref_pose_record['rotation']).yaw_pitch_roll
yaw_deg = -np.degrees(ypr_rad[0])
rotated_cropped = np.array(Image.fromarray(cropped).rotate(yaw_deg))
# Crop image.
ego_centric_map = crop_image(rotated_cropped, rotated_cropped.shape[1] / 2,
rotated_cropped.shape[0] / 2,
scaled_limit_px)
# Transformation done to compensate for not using the matplotlib.imshow extent paramater
points_total += np.array((axes_limit, axes_limit, 0, 0)).reshape((4, 1))
points_total /= basic_mask.resolution
ego_centric_map = np.flipud(ego_centric_map)
# Plotting
if do_plot:
plt.figure()
plt.imshow(ego_centric_map, cmap='gray', vmin=0, vmax=255)
plt.scatter(points_total[0, :], points_total[1, :], s=3)
plt.plot(axes_limit / basic_mask.resolution, axes_limit / basic_mask.resolution, 'x', color='red')
return points_total[:3, :], ego_centric_map