Hi,
I have got both radar data and annotation in the same scene.
How do I EASILY know which object each radar point belongs to?
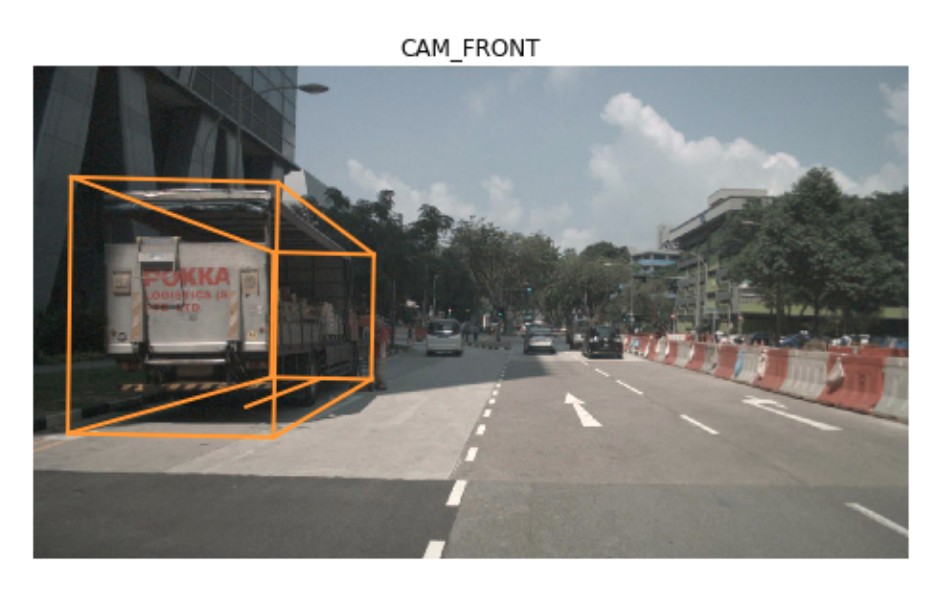
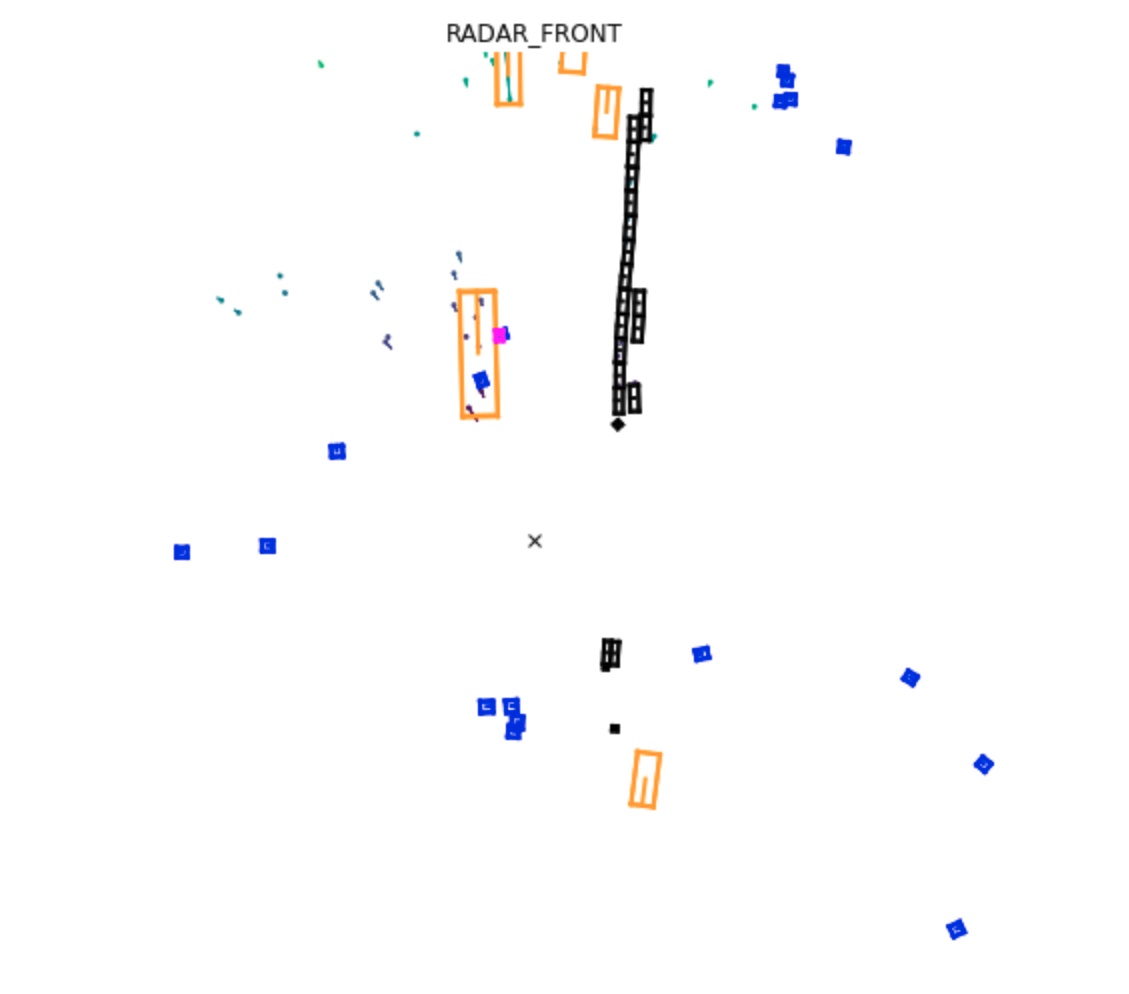
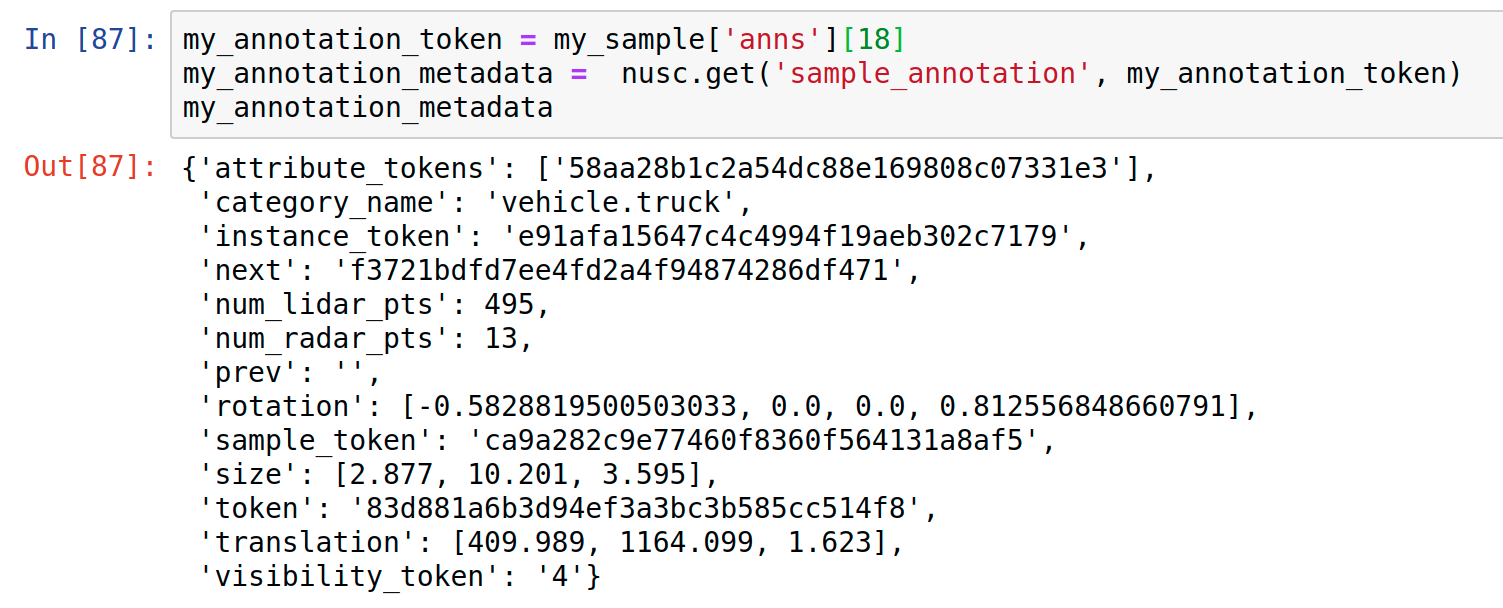
For the example below, we can see a truck was annotated in the front camera view, and it had 13 radar points from the reading of its sample annotation. I can access the radar pcd file to read all the radar points. How do I know which 13 radar points this truck have?
As it already have the number of the radar points in the truck’s sample annotation, I think the exact 13 radar points should also be accessed easily.
Or I have to find the radar point belongs to that truck if the global position of the radar point falls into the bounding box of this truck?
And according to the detailed info in sample_annotation as below:
"num_radar_pts": <int> -- Number of radar points in this box. Points are counted during the radar sweep identified with this sample. This number is summed across all radar sensors without any invalid point filtering.
I suppose there must be a internal function can read all these radar points.
And if possible, please email me any detailed documents about radar sensor and its outputs. It seems that there is a dataset describing the radar return, but it’s not available on this site.
Thanks,
Feng