
The radar point cloud includes the (x,y) position and the (vx,vy) velocity vector, both of which in the radar frame, I assume. If we normalize the position vector (x,y) we get the line-of-sight direction between the radar and the target. Doing the same for the (vx,vy) vector, I would have expected the line-of-sight direction from both these vectors to be exactly the same, since the radar can only measure the radial velocity. This doesn’t seem to be the case, as the two directions can be different. Can you suggest why this is so?
Radar velocities don't match line-of-sight direction
1 Like
Are you working with the “raw” data directly from the file or are you using our codebase. Note that in our codebase the x/y/z position is usually transformed to different coordinate frames, whereas we keep the vx/vy untouched.
Are you using the compensated velocities?
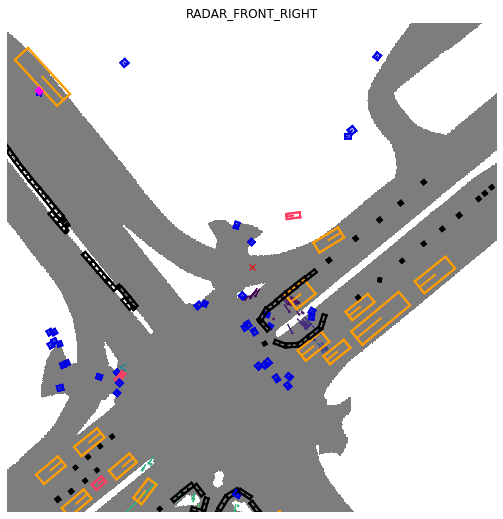
If we look at the following example from the tutorial, we see that all radar velocity vectors are indeed pointing at the front right radar (x represents the rear axel of the vehicle). Did you take into account that there are multiple radars pointing in different directions?
1 Like